西门子SMART ST40如何调试运动控制?
1、运动向导
点击左侧运动向导,根据向导提示,完成运动组态。

2、控制面板
在PLC处于STOP状态下,可以使用上方工具栏中的“控制面板”进行调试。

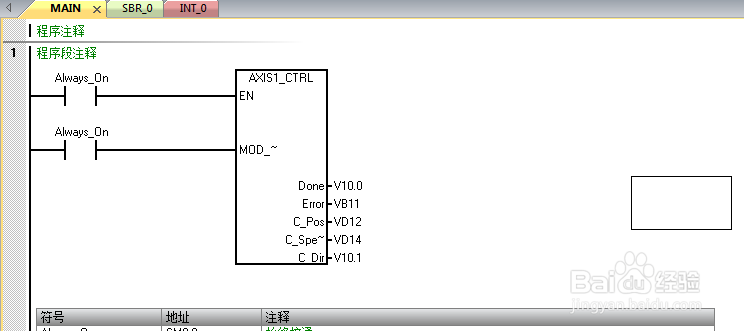
3、程序初始化
在生成的子程序中,选择初始化启动程序,输入设置为长通。
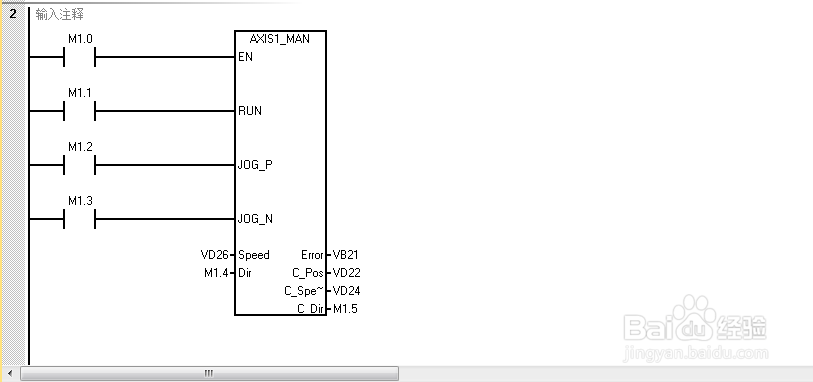
4、手动及点动控制
选择手动和点动子程序,设置相应的方向和速度即可,如下图所示。
5、自动控制
自动控制,首先选择运动模式,然后选择运动位置,输入使用上升沿。

6、更改当前位置
可以使用此子程序,更改当前电机位置。

阅读量:155
阅读量:113
阅读量:41
阅读量:129
阅读量:155